DS77spezifikationen |
 |
 |
| Produkte |
DS77 Pro |
DS77 Lite |
| ToF Sensor |
Sony CW iToF , 640*480dpi |
Sony CW iToF , 640*480dpi |
| ToF Frame Rate |
Max. 25fps |
Max. 25fps |
| Emitter |
940nm VCSEL*2 |
940nm VCSEL*2 |
| ToF Field of View |
70°(H)* 50°(V) |
70°(H)* 50°(V) |
| RGB Module |
No RGB |
No RGB |
| RGB Field of View |
No RGB |
No RGB |
| Power Supply |
PoE+/12V~24V DC |
12V~24V DC |
| Physical Connection |
M12 Aviation Plugs |
RJ45+DC Jack |
| Communication |
1000M ethernet&RS485 |
1000M ethernet&RS485 |
| Output Format |
16bit(depth)+8bit(IR) |
16bit(depth)+8bit(IR) |
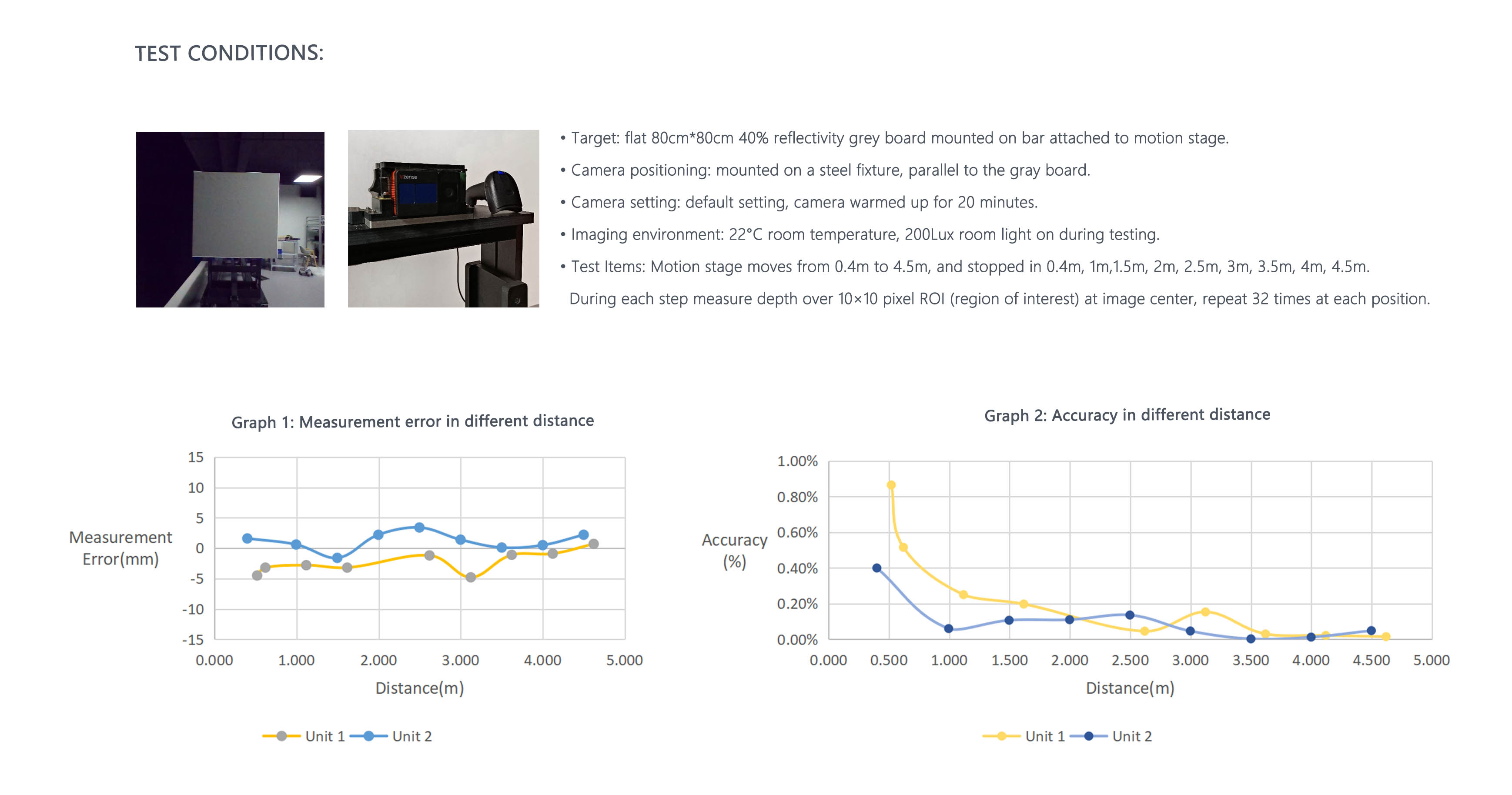
| Accuracy |
<1%(4mm@1m) |
<1%(4mm@1m) |
| Work Range |
0.15~5m |
0.15~5m |
| Work Temperature |
-20°C ~ 50°C |
-20°C ~ 50°C |
| Operation System & Platform |
Windows/Linux/Arm Linux/ROS1/ROS2 |
Windows/Linux/Arm Linux/ROS1/ROS2 |
| SDK Support |
C/C++/Python/C# |
C/C++/Python/C# |
| IP Rating |
IP67 |
IP42 |

【Produkt】Wie verhält sich die ToF-Kamera in der hellen Außenlichtumgebung?

Bei Veränderungen des Umgebungslichts kann das von der ToF-Kamera aufgenommene Bild eine hohe Stabilität beibehalten, was einer der Gründe ist, warum sich viele Benutzer für eine ToF-Kamera entscheiden. Um zu sehen, wie Vzense ToF-Kameras im Freien bei hellem Licht funktionieren, schauen Sie sich dieses Video an: https://youtu.be/SWUsVR0-I54
【Produkt】Wie passt man das Vzense 3D ToF-Modul an?
Für Batch-Anforderungen kann Vzense-Technologie 3D-ToF-Module in Bezug auf Aussehen, Größe und Struktur, Verwendungsabstand, Blickwinkel, Schnittstellenprotokoll und Betriebssystem-SDK tiefgreifend anpassen. Entsprechend verschiedenen Anpassungsanforderungen variiert der Entwicklungszyklus. Im Allgemeinen dauert es 2-3 Monate für Prototypenproben, und es dauert insgesamt 5-6 Monate, bis Produkte die Massenproduktionsstufe erreichen.
【Produkt】Beeinträchtigt eine zu hohe Umgebungstemperatur die Stabilität der Ausrüstung?
Wenn die Umgebungstemperatur, die für jedes Produkt angegebene Temperatur nicht überschreitet, wird die Stabilität des Moduls nicht beeinträchtigt. Es wird empfohlen, die Grenzgebrauchstemperatur von -20 °C - 60 °C nicht zu überschreiten. Alle Modelle von Kameraprodukten wurden auf die Zuverlässigkeitstest bei hohen und niedrigen Temperaturen getestet. Wenn es in einer Umgebung mit extrem hohen Temperaturen verwendet werden muss, wird empfohlen, ein externes Wärmeableitungsdesign hinzuzufügen, z. B. einen Kühlkörper oder einen Lüfter, die eine gewisse Schutzwirkung auf den langfristigen Betrieb des Moduls haben.
【Produkt】Warum verbiegt sich das Tiefenbild, wenn man eine rechtwinklige Wand mit einer ToF-Kamera aufnimmt?
Da Mehrwegeinterferenzen in rechtwinkligen Ecken auftreten, prallt das Licht der Kamera in den Ecken hin und her, so dass es gekrümmt erscheint.
【Produkt】Kann die ToF-Kamera an regnerischen Tagen verwendet werden, und beeinträchtigen regennasse Objektive die Kameraleistung?
Regnerische Umgebung beeinträchtigt die Messgenauigkeit der Kamera, daher wird nicht empfohlen, sie bei Regen zu verwenden. Bei mehreren Kameras, die IP67-Standard erfüllen, wird die Kamera in regnerischer Umgebung nicht beschädigt.
【Produkt】Wie lange dauert die Verzögerung zwischen der Generierung von Vzense ToF-Kamerabildern und deren Erfassung durch SDK?
Die Verzögerung von Vzense ToF-Kameras verschiedener Modelle wird aufgrund unterschiedlicher Übertragungsschnittstellen und Hostleistung unterschiedlich sein, und die Reichweite ist etwa 50 - 100ms. Der Benutzer kann die verwendete Plattform über den Soft-Trigger-Modus testen.
【Produkt】Ist die von der Vzense ToF-Kamera verwendete Lichtquelle schädlich für den menschlichen Körper?
Die Gesamtleistung der VCSEL-Geräte, das in der Vzense ToF-Kamera verwendet wird, überschreitet nicht 2W. Das Produkt hat die Zertifizierung für Augensicherheit nach FDA-Klasse I bestanden und verursacht keinen Schaden für den menschlichen Körper.
【Produkt】Wird die Messgenauigkeit beeinträchtigt, wenn die Vzense ToF-Tiefenkamera schwarze, hohe Reflektivität und transparente Objekte misst?
[Product] For Vzense RGB-D cameras (such as DCAM560C and DS77C), are RGB images aligned with depth images?
Yes. Before the standard Vzense RGB-D camera leaves the factory, the internal and external parameters have been calibrated. The output RGB image and the depth image have been aligned on the camera's internal processor. At the same time, the interface for users to align themselves has been opened. After the user gets the camera, he can view the alignment effect between RGB and depth map through the GUI. There are two alignment effects for viewing: RGB pixel points correspond to depth image pixel points, and depth image pixel points correspond to RGB pixel points.
[Product] Can the lens surface of Vzense's ToF camera be protected by adding a transparent cover plate?
No.The product body has been equipped with a protective cover plate. If you have additional requirements for the hardness of the cover plate, you can contact us for customization. The maximum hardness can reach 9H. If the user adds a cover plate by himself/herself, it will interfere with the optical path of the ToF module, which will greatly affect the imaging quality and accuracy of the module.
[Operation] Why can I search for network devices but can't turn on the camera?
There are several situations when the camera cannot be turned on when the webcam is found: 1 Whether the connection between the camera and the host is good, and whether the network card of the host is available. 2. The camera and the host are not in the same network segment. If the camera is set to a non DHCP mode, make sure that the fixed IP address of the camera is on the same network segment as the host, such as 192.168.1. X. If the camera is set to DHCP mode, please ensure that the camera and the host are in the same LAN, and the router/switch has the DHCP sever function. 3. Whether the network permission to run the software is restricted. 4. Whether the UDP function of the network is prohibited by the LAN security policy. 5. Whether the 900790089009 port number of the LAN is prohibited. 6. Whether the power supply of the camera is sufficient. If you use a non PoE mode, make sure that the adapter is turned on and plugged in. If none of the above measures can solve the problem, please use the ipconfig command to check the network status on the PC side, and disable the network except for the same network segment with the camera to search for devices again. If the problem still can’t be solved after that, please contact our engineer for support.
[Operation] After using the upgrade tool to upgrade the Windows system, how to solve the problem of flash back of the operating platform?
There is an upgrade driver in the upgrade tool. If the driver is not installed, this problem will occur. After the driver is successfully installed, the flash back problem will be solved.
[Operation] Why can't I open the IR map and depth map saved through GUI? How to view the point cloud map?
Whether for UTool used by DCAM series or NebulaGUI used by DS series, the IR and Depth images saved by both are 16bit image data, which cannot be opened by using the system's own image browser, but can be opened and viewed by using software such as ImageJ; The point cloud map saved by the GUI is in. txt format. From top to bottom, it is the coordinate point information from pixel 0 to the last pixel. The values in each row are the X, Y, Z coordinates of the pixel. The saved point cloud map can be viewed using CloudCompare software. For related instructions, please refer to the link:https://cdn.yun.sooce.cn/4/62267/pdf/16339227552770a0bd9e3dcaf8a6b.pdf
[Operation] [DS Series] How to improve the camera's detection of black objects?
TOF camera calculates the distance from the object to the camera by calculating the time between the light from the camera and the return light from the object received by the camera. Different object surface colors and materials have different reflectivity and absorptivity to light. Therefore, if the measured object is a smooth black object, it may not be recognized. The following methods can be tried: 1. Reduce the product frame rate (for example, 5 frames) and increase the exposure time (for example, 4000); 2. Change the Confidence filter threshold to 2 or 5
[Operation] [DS Series] How to change the default parameters of the product (such as output mode, IP settings, etc.)?
DS series does not support parameter configuration such as device output mode, but only supports changing device network mode and IP. If you need to change the camera output mode, frame rate and other parameters, you can call the SDK interface. For specific methods, refer to the SDK development documentation. Change IP tool: https://github.com/Vzense/NebulaGUITool (Including usage documents)
[Operation] [DS Series] How to upgrade the firmware of the Vzense DS Series ToF camera?
You can upgrade through NebulaGUITool under Windows. The link is: https://github.com/Vzense/NebulaGUITool (Including upgrade firmware and usage documents)
[SDK] The development language and operating system platform supported by Vzense ToF camera?
Development language: C/C++, ROS, Python, C # operating system: Windows/Linux/Arm Linux
[SDK] How to use Vzense products for secondary development?
Vzense Software Development Kit (SDK) supports SDKs of different software platforms and programming languages to help users quickly build and expand customized solutions. SDK download link: https://github.com/Vzense
[SDK] Does the depth value of each point of the camera refer to the distance from the point to the camera point or the distance from the point to the camera plane?
The default is the distance from the point to the camera plane. You can call interface Ps2_ SetComputeRealDepthCorrectionEnabled: true (the default value) represents the distance from the point to the camera plane; False represents the distance from the point to the camera point.
[SDK] How to obtain color point cloud with RGB mapping in SDK?
The SDK does not directly provide samples of color point clouds with RGB mapping. Call can be completed according to the following process: 1. Set VZ_ SetTransformColorImgToDepthSensorEnabled to Enable; 2. Obtain VzTransformedColorFrame image and point cloud generated by depth; 3. Save the VzTransformedColorFrame and point cloud obtained in 2 as a xyzrgb point cloud file.
[SDK] When running the program under Tools of the Linux Base SDK, if it prompted with "error while loading shared libraries xxx.so file too short", what is the reason?
The above errors are generally caused by the user downloading and unzipping the SDK on a Windows computer, and then copying the unzipped file to the Linux system. Please copy the downloaded SDK package directly to the Linux system, unzip it on the Linux system, and then run it.
[SDK] During the use of SDK, can the Ps2_ ReadNextFrame timeout be changed?
Yes, set up via interface Ps2_ SetWaitTimeOfReadNextFrame. Please refer to the SDK documentation for specific steps.
[SDK] During the use of SDK, what is the reason for the timeout of Ps2_ ReadNextFrame?
Ps2_ ReadNextFrame is used to query the SDK image ready. If there is no ready, it will sleep and wait. If the image cannot be obtained during the default waiting time, it will timeout and exit. The default timeout is 350ms. However, if the user uses the slave trigger mode, because the trigger frequency is uncertain, when the frequency exceeds the default timeout, the user will also receive a read timeout, but the use will not be affected.
[SDK] Where is the Vzense SDK log stored?
Windows: C:\Users\xxxx\AppData\Local\Vzense\Log Linux: /home/.config/Vzense/Log
[SDK] Are the images displayed using Vzense graphical software tools for post-processing? How to view the effects of various post-processing algorithms?
Yes. Users can use GUI tools to adjust and set the switches of various processing effects according to the instructions, determine the required processing effects or parameters according to their own project needs, and adjust the module default values through various interfaces in the SDK.
[SDK] [DS Series] How to solve the problem if reporting errors when compiling Nebula SDK?
First, ensure that the downloaded Nebula SDK is unzipped under the Linux system, and do not copy it for use after unzipping in the Windows system; Secondly, ensure that all files in the lib folder (including the config file) are copied to your own project files.
Learn more in GITEE or FAQ for SDK question

 DE
DE