Unsere Lösung:
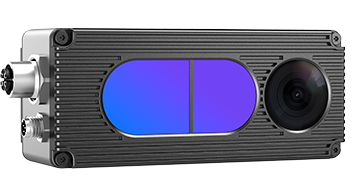
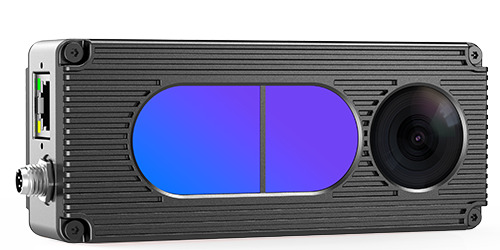
Die Vzense 3D-ToF-Kamera identifiziert und erfasst Position, Farbe, Größe, Form und andere physische Attribute von Gegenständen auf dem Hochgeschwindigkeits-Förderband und arbeitet mit dem Parallelroboter zusammen, um das Greifen, Sortieren, Verpacken und Stapeln von Waren durchzuführen.
Die am Roboter installierte externe Kamera löst ein Signal aus, wenn sie das Aussehen des Zielobjekts erkennt. Das Signal wird von der Software-Entwicklungsplattform empfangen und gelesen. Die Kamera erfasst das Bild des Zielobjekts in ihrem Sichtfeld, führt eine Reihe von Identifizierungs- und Positionierungsvorgängen mit Hilfe von Bildverarbeitungsalgorithmen durch und leitet die verarbeiteten Daten an den Roboter weiter. Schließlich übernimmt der Roboter das Sortieren und Greifen der Gegenstände auf dem Förderband gemäß spezifischer Algorithmen.

Unsere Kunden:
Robot Phoenix widmet sich der Entwicklung von leichten und schnellen Industrierobotern. Das Unternehmen bietet eine Reihe von Produkten an, darunter Parallelroboter, SCARA-Roboter, kleine Sechs-Achs-Roboter, Koordinatenroboter, FTS-Roboter, Wafer-Handling-Roboter, Robotersteuerungen und visuelle Module. Robot Phoenix hat einen großen Marktanteil an Parallelrobotern in China und ist ein wichtiger Marktteilnehmer in dieser Branche. Unser DCAM560C wird als Standardkonfiguration auf dem Parallelroboter (Spinnenklauenroboter) Bat1100-S3 von Robot Phoenix für dynamisches Greifen und Sortieren verwendet. Er bietet dem SCARA-Roboter eine Bildführung, um das Greifen und Sortieren von Materialien und Produkten in der Produktionslinie zu erledigen.
Darüber hinaus werden unsere 3D-ToF-Kameras in Großserie hergestellt und in Bereichen wie Palettenpositionierung, Haltungserkennung und Hindernisvermeidung durch FTS-Gabelstapler, Aufteilung von Paketen, Depalettierung und Palettierung, dynamisches Greifen und Sortieren sowie Ernte in der intelligenten Landwirtschaft eingesetzt.

 DE
DE